Softball Swing Trainer

Goal:
Build posture monitoring device to provide haptic feedback when the user has incorrect posture while swinging a bat.
This project was developed in conjunction with Ashley Reilly.

Process:
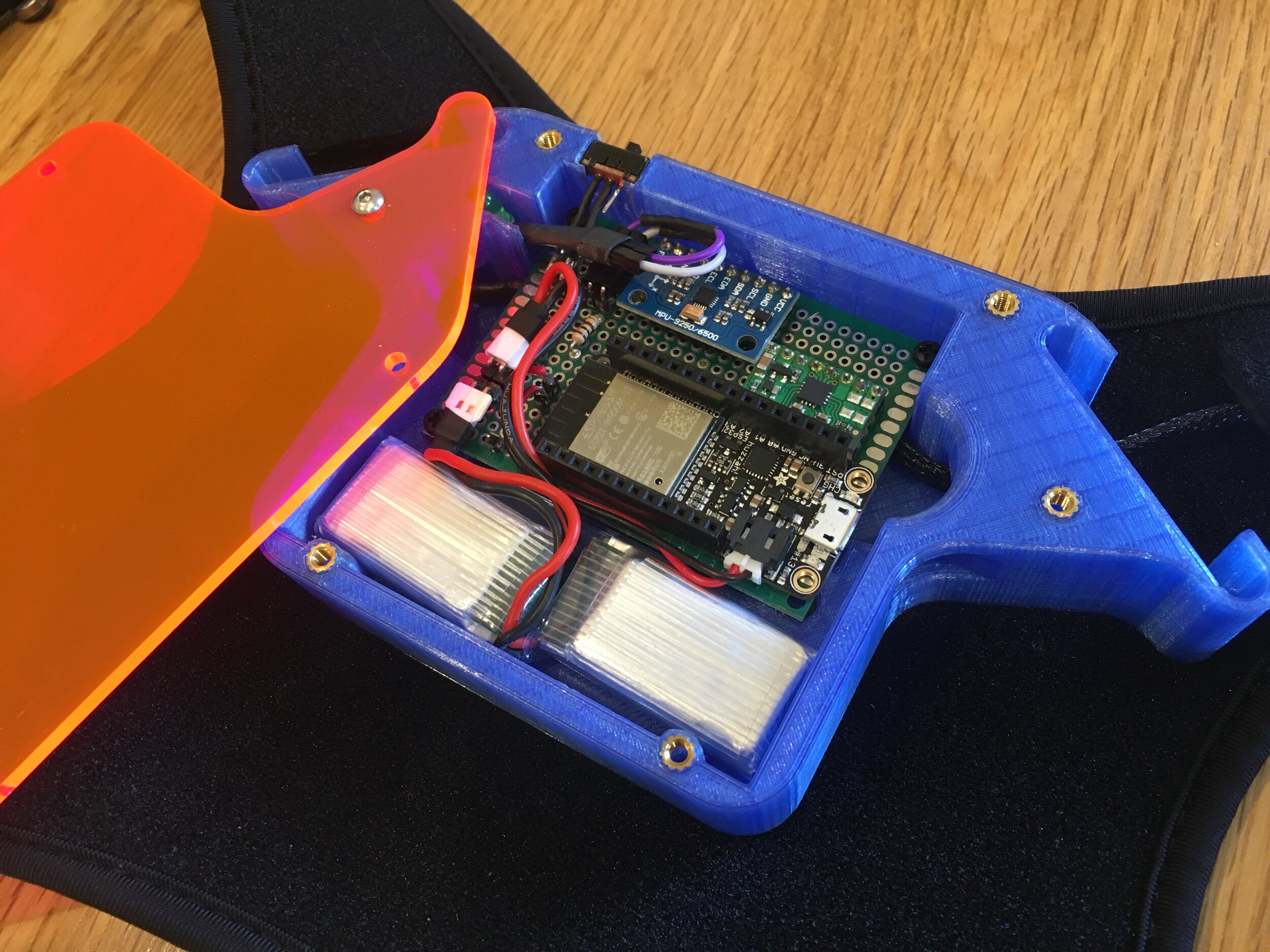
From prior experiences with the individual components (microcontroller, motors, accelerometer) we integrated that knowledge into a single function device.
Using the accelerometer we recorded the motion of the user swinging a bat correctly (level shoulders) and incorrectly (dipping outside shoulder.
When a bad swing is detected, vibratory motors are triggers to alert the user so that they can correct their posture on the next swing.
Challenges:
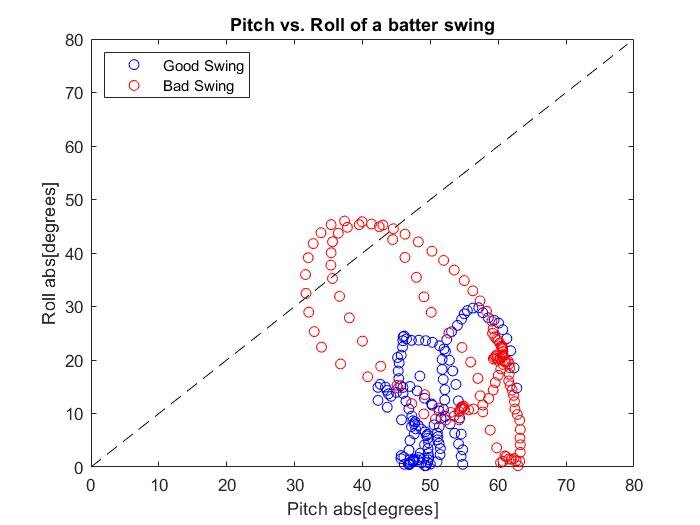
Quantifying the readings from the accelerometer into “good” and “bad” swings required some data analysis.
Using Matlab we plotted the pitch vs. roll data from the accelerometer and made a determination that bad swings had the unique momentary condition that Roll > Pitch. This became our trigger condition in our microcontroller to activate the vibratory motors.
Additionally, care was taken in power management to make sure all components in our device had proper voltage and current, and that our power supply could operate the device for a useful amount of time.
Lessons Learned
For a prototype we should have components easier to replace or change. In hindsight we built this more as a finished product then as a prototype.